
Notice
Recent Posts
Recent Comments
Link
반응형
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 |
Tags
- sparkmain(clone) 무한생성
- 트리구조
- unity sparkmain(clone)
- readonly
- list clear
- raycast
- unity korea
- 티스토리챌린지
- navisworks api
- sparkmain(clone)
- Unity
- 너비탐색
- 크루스칼
- 최소신장트리 mst
- C#
- 오블완
- 최단거리 알고리즘
- 행동트리
- dfs
- 유니티 sparkmain(clone)
- dropdown
- 디지털트윈
- 유니티
- articulation body
- 습관형성 #직장인자기계발 #오공완
- GetComponent
- 깊이탐색
- 드롭다운
- Simulation
- removeAll
Archives
- Today
- Total
낑깡의 게임 프로그래밍 도전기
유니티 C# Behaviour Tree(행동트리) ...어렵다 본문
반응형
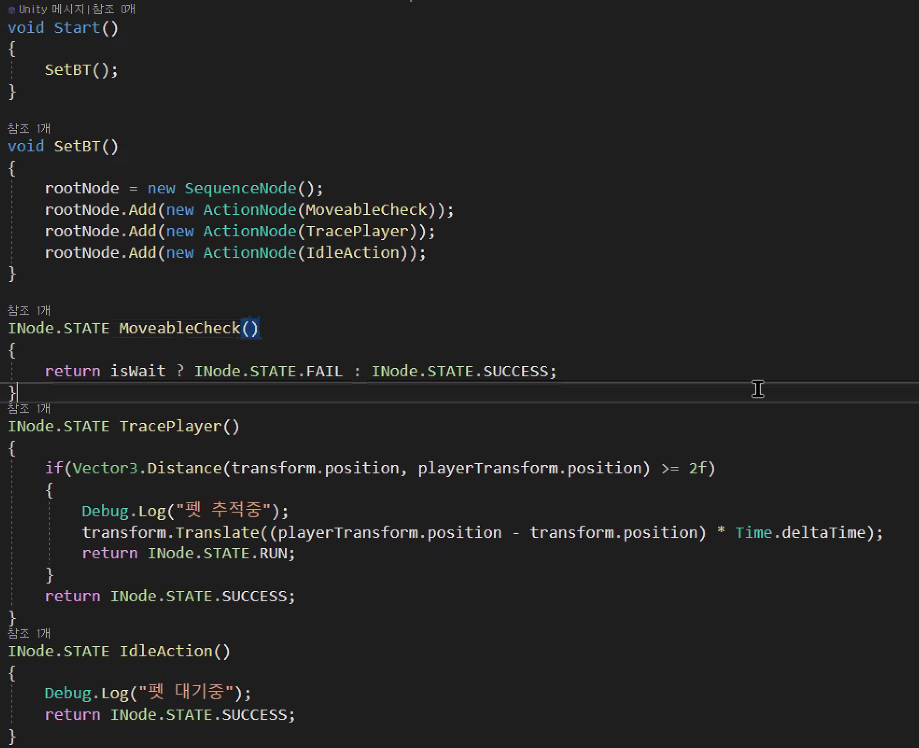
행동트리 : Behaviour Tree
BT라고도 한다.
BT는 논리적은 트리 구조를 사용하며 루트 노드에서 시작해 깊이 우선탐색(DFS)으로 자식 노드를 평가하고 평가 결과를 다시 부모 노드에게 반환하는 구조를 가진다.
각 노드는 3가지 상태중 하나를 가질 수 있으며 그 목록은 아래와 같다.
Failure(실패)
Running(동작 중)
Success(성공)
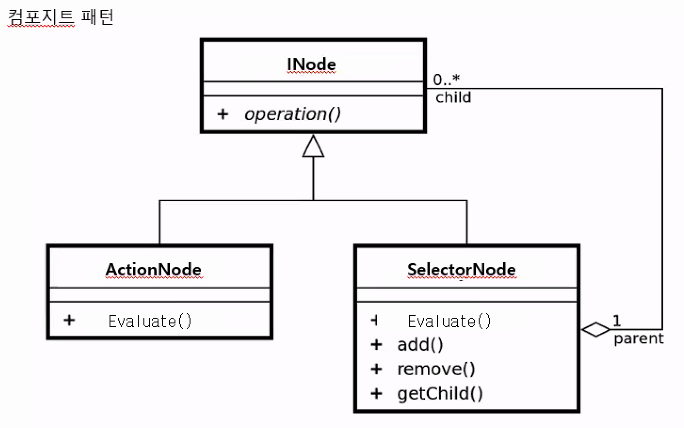
행동 트리 구조

행동트리 전체 예제 코드
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using System;
using Unity.VisualScripting;
public interface INode
{
public enum STATE
{
RUN,
SUCCESS,
FAIL
}
public INode.STATE Evaluate();
}
//ActionNode는 항상 단말에 위치해야함으로, 자식이 있어선 안됨.
public class ActionNode : INode
{
public Func<INode.STATE> action;
public ActionNode(Func<INode.STATE> action)
{
this.action = action;
}
public INode.STATE Evaluate()
{
if (action == null)
return INode.STATE.FAIL;
else
return action();
}
}
public class SelectorNode : INode
{
List<INode> childs = null;
public SelectorNode()
{
childs = new List<INode>();
}
public void Add(INode node)
{
childs.Add(node);
}
public INode.STATE Evaluate()
{
if (childs.Count <= 0)
return INode.STATE.FAIL;
foreach(INode childNode in childs)
{
INode.STATE nState = childNode.Evaluate();
switch(nState)
{
case INode.STATE.RUN:
return INode.STATE.RUN;
case INode.STATE.SUCCESS:
return INode.STATE.SUCCESS;
}
}
return INode.STATE.FAIL;
}
}
public class SequenceNode : INode
{
List<INode> childs;
public SequenceNode()
{
childs = new List<INode>();
}
public void Add(INode node)
{
childs.Add(node);
}
public INode.STATE Evaluate()
{
if (childs.Count <= 0)
return INode.STATE.FAIL;
foreach (INode childNode in childs)
{
switch(childNode.Evaluate())
{
case INode.STATE.RUN:
return INode.STATE.RUN;
case INode.STATE.SUCCESS:
continue;
case INode.STATE.FAIL:
return INode.STATE.FAIL;
}
}
return INode.STATE.SUCCESS;
}
}
public class Enemy : MonoBehaviour
{
public int defectiveRange;
public int attackableRange;
SelectorNode rootNode;
SequenceNode attackSequence;
SequenceNode defectiveSequence;
ActionNode idleAction;
ActionNode returnAction;
Transform target = null;
Vector3 originPos;
// Start is called before the first frame update
void Start()
{
originPos = transform.position;
SetBT();
}
public void SetBT()
{
//공격 시퀀스//
attackSequence = new SequenceNode();
attackSequence.Add(new ActionNode(CheckInAttackRange));
attackSequence.Add(new ActionNode(Attack));
//감지 시퀀스//
defectiveSequence = new SequenceNode();
defectiveSequence.Add(new ActionNode(CheckInDetectiveRange));
defectiveSequence.Add(new ActionNode(TraceTarget));
//귀환 액션//
returnAction = new ActionNode(ReuturnOriginPos);
//대기 액션//
idleAction = new ActionNode(IdleAction);
rootNode = new SelectorNode();
rootNode.Add(attackSequence);
rootNode.Add(defectiveSequence);
rootNode.Add(returnAction);
rootNode.Add(idleAction);
}
INode.STATE Attack()
{
Debug.Log("공격 중");
return INode.STATE.RUN;
}
INode.STATE CheckInAttackRange()
{
if (target == null)
return INode.STATE.FAIL;
if(Vector3.Distance(transform.position,target.position) < attackableRange)
{
Debug.Log("공격 범위 감지 됨");
return INode.STATE.SUCCESS;
}
return INode.STATE.FAIL;
}
INode.STATE TraceTarget()
{
if (Vector3.Distance(transform.position, target.position) >= 0.1f)
{
Debug.Log("추적 중");
transform.forward = (target.position - transform.position).normalized;
transform.Translate(Vector3.forward * Time.deltaTime, Space.Self);
return INode.STATE.RUN;
}
else
return INode.STATE.FAIL;
}
INode.STATE CheckInDetectiveRange()
{
Collider[] cols = Physics.OverlapSphere(transform.position, defectiveRange,1<<8);
if(cols.Length > 0)
{
Debug.Log("탐지 됨");
target = cols[0].transform;
return INode.STATE.SUCCESS;
}
return INode.STATE.FAIL;
}
INode.STATE ReuturnOriginPos()
{
if(Vector3.Distance(transform.position,originPos) >= 0.1f)
{
Debug.Log("귀환 중");
transform.forward = (originPos - transform.position).normalized;
transform.Translate(Vector3.forward * Time.deltaTime,Space.Self);
return INode.STATE.RUN;
}
else
return INode.STATE.FAIL;
}
INode.STATE IdleAction()
{
Debug.Log("대기한다");
return INode.STATE.RUN;
}
// Update is called once per frame
void Update()
{
rootNode.Evaluate();
}
private void OnDrawGizmos()
{
Gizmos.color = Color.blue;
Gizmos.DrawWireSphere(transform.position, defectiveRange);
Gizmos.color = Color.red;
Gizmos.DrawWireSphere (transform.position, attackableRange);
}
}반응형
반응형
'Unity C#' 카테고리의 다른 글
| Sort 하기 (0) | 2023.11.24 |
|---|---|
| 최소힙 (0) | 2023.11.23 |
| 유니티 C# tree(트리) (0) | 2023.11.21 |
| 제트카라 재 커스텀 (0) | 2023.11.17 |
| C# 딕셔너리 (1) | 2023.11.16 |
'Unity C#' Related Articles
more


